LEÓN ELECTRICO
El Blog de maquinas sincronas y CD

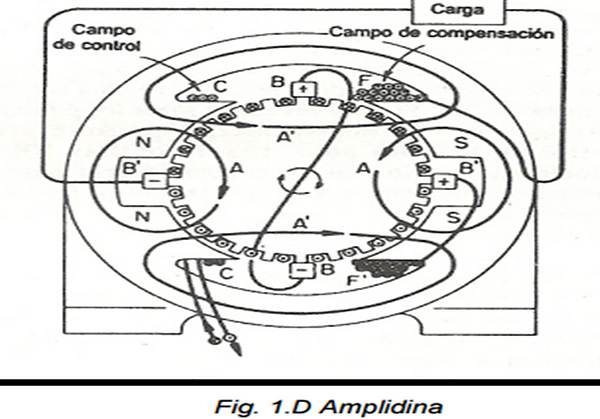
Amplidina
•Máquina eléctrica de corriente continua que se emplea en servosistemas como amplificador de potencia.
•La amplidina es un amplificador magnético giratorio de tensión de corriente continua, es decir, un dispositivo de corriente continua que amplifica la potencia de una señal mediante cambios en su tensión de excitación, de respuesta rápida y factor de amplificación elevado. Se utiliza en algunos servosistemas
•La amplidina es una máquina de campo transversal útil con varios arrollamientos en los polos y escobillas transversales cortocircuitadas que se utiliza como amplificador de potencia y también con funciones de regulador. La amplidina como amplificador dinámico consigue ganancias de potencia del orden de 10000. Se ha utilizado en sistemas de regulación de ciclo cerrado:reg. Automática de la tensión de alternadores de potencia, regulación en grupos Ward-Leonard...
Diagrama en bloques del sistema. Las variables involucradas son:
Vr : Voltaje de referencia
Vy : Voltaje de excitación de la amplidina
Va : Voltaje de armadura del motor (variable manipulada)
Tz : Torque resistente del motor (perturbación)
Wc : Velocidad angular del motor (variable controlada)
Vc : Voltaje de salida del sensor.
El actuador es una amplidina, es decir, un amplificador electromecánico con el cual es posible conseguir altas potencias. Consta básicamente de un generador de corriente continua de excitación separada con sus terminales cortocircuitados. En cuadratura con el flujo producido por el generador se tiene un segundo par de escobillas, el que permite obtener, en régimen permanente, un voltaje de salida Va proporcional a la señal de entrada Vy.
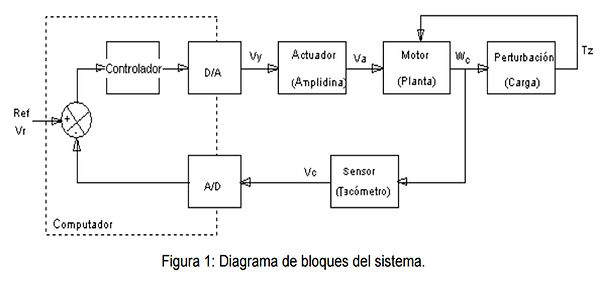
La planta es un motor de CD de velocidad variable con excitación de campo constante. La velocidad puede controlarse por medio del voltaje de armadura Va. La perturbación principal que afecta al motor es el torque resistente Tz que opone la carga conectada mecánicamente al eje. Como carga se dispone de un generador de corriente continua, el cual entrega energía eléctrica mediante una carga resistiva RL. Para medir la velocidad del motor se utiliza como sensor un tacómetro de corriente continua, que es un generador de excitación separada. El controlador, por último, presenta cuatro modos de acción:
manual, proporcional, integral y proporcional-integral.
Los parámetros del controlador PI son ajustables dentro de rangos determinados.
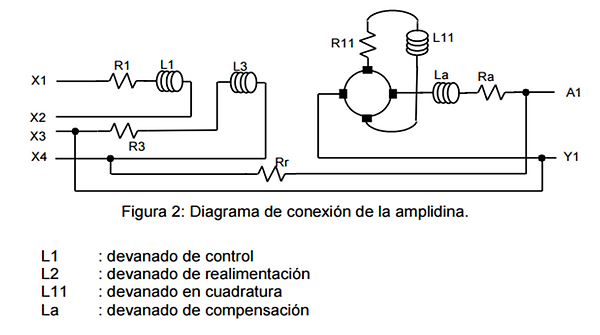
El diagrama de conexión de la amplidina a ser utilizada en la experiencia, destacándose que las bobinas L1, L3 y La están en cuadratura con respecto a la bobina L11. A los terminales x1 - x2 se conecta la señal de entrada Vy. Los terminales x3 - x4 se emplean para realimentar el voltaje de salida de la amplidina. La bobina La permite compensar totalmente el efecto producido por la corriente; de este modo se logra una independencia del voltaje de salida Va de la corriente Ia que entrega la amplidina. En estas condiciones la amplidina puede modelarse por un sistema de primer orden.
Las características del sensor son similares a las del generador. Para la medición casi no se consume corriente, de forma que la tensión generada es prácticamente proporcional a la velocidad; la curva de calibración, para una tensión de campo de 15 volt. Al tacómetro se ha incorporado un circuito RC con fines de filtrado.